Seafloor Crawling Robotics: Neue Tools für anspruchsvolle Missionen

Abbildung 1 Der Sea Otter Surf Zone Crawler. Bild: C-2 Innovationen, Inc.

Abbildung 3: Der Sea Ox mit einem geschleppten Nutzlastschlitten. Bild: C-2 Innovationen, Inc.
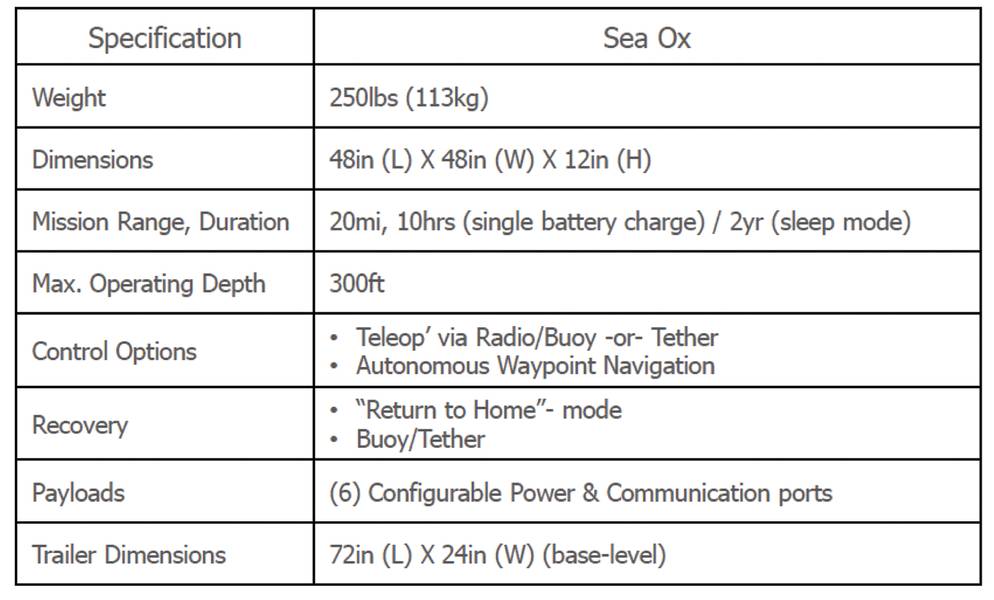

Tabelle 1: Sea Ox Spezifikationen. Bild: C-2 Innovationen, Inc.
Zurück zum Meer
Es wird allgemein gesagt, dass das Leben im Ozean begann und sich allmählich zu Land bewegte. Bei Raupenrobotern ist dieser Trend umgekehrt. In den frühen 2000er Jahren entwickelten sich kompakte Bodenroboter, die von bedeutenden Verteidigungsforderungen angetrieben wurden, schnell. Produkte wie der PackBot von iRobot und der Talon von Foster-Miller leisteten Pionierarbeit bei tragbaren Bodenrobotern. Die Anforderungen in rauhen Umgebungen machten diese Werkzeuge robust und inspirierten vollständig wasserdichte Varianten. Leider waren zu dieser Zeit Einschränkungen bei der Energiespeicherung, der Autonomie und der Telemetrie für Robotikroboter am Meeresboden ein Novum und kein produktives Werkzeug. Das hat sich geändert.
Durch die Brandung
Heute hat C-2 Innovations, Inc. (C2I) eine Familie von fähigen, produktionsfertigen Kriechrobotern auf dem Meeresgrund entwickelt, die die Benutzer zurück in die Brandungszone und ins Meer führen. Zu dieser Familie gehören der kompakte Sea Otter und der größere Sea Ox.
Der Sea Otter Surf Zone Crawler (SZC), Abbildung 1, ist ein vollständig autonomer amphibischer Boden-Crawler der zweiten Generation, der in Tiefen von bis zu 100 m durch Hochwasserregime und an Land betrieben werden kann. Ohne ein Halteband kann das System in Regionen und Strömen arbeiten, die frühere Systeme nicht konnten.
Der C-2i Otter kann 16 km unter Wasser oder 20 km an Land fahren und für einen Monat am Bahnhof bleiben; Zurückgeben entweder auf Befehl oder auf einer zuvor vereinbarten Zeitüberschreitung. Die Fähigkeit, in gemischten Umgebungen zu arbeiten, ist einzigartig, während die SZC den Zugang zu Bereichen ermöglicht, die von Handwerkern, Schwimmern oder auf Menschen basierenden Techniken nicht erreicht werden können. Die Sea Otter SZC arbeitet mit negativem Auftrieb, während sie in der unteren Energiegrenzschicht arbeitet. Das niedrige Profil minimiert den Stromwiderstand weiter. Das Fahrzeug wurde in 1,5 m tiefer Brandung betrieben und kann weiches Gelände überqueren, das keine menschlichen Lasten aufnehmen kann. Jüngste Tests haben gezeigt, dass 40-kg-Nutzlasten transportiert und 45-kg-Schlitten über verschiedene Meeresoberflächen geschleppt werden können.
Spezifikation der Otter-SZC umfassen:
• Symmetrische beidseitige Bedienung für den Betrieb in der schweren Brandung
• Gewicht: 45 kg trocken, 1 m lang, 55 cm breit und 25 cm hoch (in Länge und Breite erweiterbar)
• Geschwindigkeit: vorwärts oder rückwärts, variabel bis zu 1 m / s
• Navigation: 3-Achsen IMU, FOG, Dual-Encoder, zweiseitiges GPS mit zwei Frequenzen
• Steuerung: Der Benutzer wählt eine vollständig autonome (vorprogrammierte), Halteband- oder Funksteuerung
• Batterie: Lithium-Ionen-Akku
• Anschlüsse: Ladeanschluss, Programmierung des Ethernet-Ports, zwei Gast-Ethernet-Ports
Das Sea Otter Design ist modular. Die Steuerbord- und Backbordpontons sind Kernstücke, aber die Länge, die Breite und die Bodenfreiheit können durch Verlängern der Leitradhalterungen oder Auswechseln der Verbindungsbrücke geändert werden. Das aktuelle Design umfasst zwei Ethernet-Gast-Ports und internen Platz für zusätzliche Leiterplatten wie Datenerfassung oder Videoboards.
Das modulare Design erlaubt es, Traglasten innerhalb von Minuten zu montieren, ohne dass die Form, das Volumen oder das Gewicht der Nutzlast berücksichtigt werden muss.
Zu den Nutzlasten gehörten unter anderem Salzgehalt, Trübung, Geschwindigkeit der Schallgeschwindigkeit, verschiedene Kameras, Sonar-Bilder, freisetzbare Bojen, Bodenpenetrometer und elektromagnetische Sensorschlitten.
 Abbildung 2: Ein Sea Otter Ladder Search Pattern. Bild: C-2 Innovations, Inc. Batterien und die gesamte Elektronik sind im Spurvolumen enthalten, wodurch das freie Volumen für die Ladebucht maximiert wird, während das "Durchschlagen" minimiert wird. Die breite Spur führt im trockenen Zustand zu Bodendrücken von weniger als 1,3 Kilopascal oder 0,43 Kilopascal beim Eintauchen. Das Gleisdesign kann für einen aggressiveren Griff modifiziert oder breiter und länger gemacht werden, um den Bodendruckkontakt zu verringern. Fender werden hinzugefügt, um Turbulenzen und Widerstand zu minimieren. Eine autonome Navigationsgenauigkeit wird durch Verschmelzen von Daten von einem einachsigen faseroptischen Kreisel (FOG) und einer 3-Achsen-Trägheitsmesseinheit erreicht. Ein Dual-Band-GPS empfängt eine Fixierung, wenn es aufgetaucht ist und wird als Gegenprobe für die Position verwendet. Drehgeber an jeder Antriebsseite messen die zurückgelegte Wegstrecke.
Abbildung 2: Ein Sea Otter Ladder Search Pattern. Bild: C-2 Innovations, Inc. Batterien und die gesamte Elektronik sind im Spurvolumen enthalten, wodurch das freie Volumen für die Ladebucht maximiert wird, während das "Durchschlagen" minimiert wird. Die breite Spur führt im trockenen Zustand zu Bodendrücken von weniger als 1,3 Kilopascal oder 0,43 Kilopascal beim Eintauchen. Das Gleisdesign kann für einen aggressiveren Griff modifiziert oder breiter und länger gemacht werden, um den Bodendruckkontakt zu verringern. Fender werden hinzugefügt, um Turbulenzen und Widerstand zu minimieren. Eine autonome Navigationsgenauigkeit wird durch Verschmelzen von Daten von einem einachsigen faseroptischen Kreisel (FOG) und einer 3-Achsen-Trägheitsmesseinheit erreicht. Ein Dual-Band-GPS empfängt eine Fixierung, wenn es aufgetaucht ist und wird als Gegenprobe für die Position verwendet. Drehgeber an jeder Antriebsseite messen die zurückgelegte Wegstrecke.
Genauigkeiten von 2% des Gesamtumfangs wurden routinemäßig erreicht. Um die Bahngenauigkeit zu erhalten, werden Einschlag- (TIP) und Bogenumdrehungen berechnet. Fig. 2 zeigt ein vorprogrammiertes Leiter-Suchmuster entlang des Wells Beach in York, Maine. Tests fanden statt, während die Flut hoch war und das System unter Wasser stand (beachte, dass das Foto bei Ebbe ist).
Neben dem Sea Otter steht eine größere Variante zur Verfügung. Der Sea Ox ist ein vielseitiger Unterseeboden-Raupenkran für die Kartierung und Bemusterung des Meeresbodens. Wie der Sea Otter ermöglicht das modulare Design einen einfachen Transport, Lagerung und Einsatz. Das System ist so ausgelegt, dass es entweder autonom oder per Fest- oder Funkbefehl arbeitet. Der Sea Ox ist in der Standardkonfiguration 122 x 122 x 30 cm groß, kann aber schnell erweitert werden, um die Reichweite oder Zugkapazität zu erhöhen. Wie in Abbildung 3 zu sehen ist, verfügt der Sea Ox über einen Unterwasserbereich von 32 km, der durch das Hinzufügen von Batteriepacks auf bis zu 64 Meilen erweitert werden kann. Das Gesamtgewicht des Traktors beträgt 113 kg und kann bei Betrieb in hoher Brandung auf 230 kg erhöht werden.
Der Sea Ox wurde ursprünglich entwickelt, um einen Instrumentierungsschlitten zu schleppen, der elektromagnetische Doppelinduktionsschlangen (EMI) von White River Technologies, Inc. enthielt. Der 60 x 180 cm schwere Schlitten wiegt inklusive Instrumentierung 30 kg. Ohne Rücksicht auf Auftriebs- oder Volumenüberlegungen wurden der Sea Ox und sein Schlitten verwendet, um zusätzliche Kundeninstrumentierungspakete wie CTD, gelösten Sauerstoff (DO), Schalllogger, akustische Bildwandler und akustische Doppler-Stromprofiler (ADCP) anzuschrauben. . In Entwicklung ist ein Multi-Shot-Coring-System, um physikalische Proben aus der Meeresboden-Umgebung zu holen.
Zwei überzeugende Anwendungen
Krabbelroboter am Meeresboden sind keine einfachen Neuheiten. Sie ermöglichen viele kritische Anwendungen. Die amphibische Natur des Sea Ox ermöglicht den Betrieb an Land, durch und einschließlich der Übergangszone bis zu einer Tiefe von 100 m. Ein niedriges 30-cm-Profil reduziert den Widerstand, indem es in der Grenzschicht Boden / Wasser mit geringerer Geschwindigkeit arbeitet, und ermöglicht es, unauffällig im Oberflächenverkehr zu arbeiten. Die breite Spur erzeugt einen extrem niedrigen Bodendruck von 0,0186 bar, der extrem weichen Boden passieren kann, der eine Größenordnung weniger ist als bei Menschen. Mit einer Unterwasserstrecke von 16 km (Oberfläche von mehr als 32 km) kann er ganze Strände an einem einzigen Tag erkunden. Die Modularität des Sea Ox erlaubt es, dass er durch empfindliche Strandbereiche getragen wird und von einer einzelnen Person vom Ufer aus gestartet und geborgen werden kann; die Kosten für Umfragen auf einen Bruchteil herkömmlicher Systeme zu reduzieren, bei denen die logistischen Kosten den tatsächlichen Betrieb übersteigen können. Einige aktuelle Anwendungen haben dieses Potenzial aufgezeigt.
UXO-Korrektur
Der Sea Ox ist eine portable Bodenmobilitätsplattform für UXO-Untersuchungen in Übergangs-, Brandungs- und sehr flachen Gewässern. Das Sea-Ox-Programm wurde durch das ESTCP (Environmental Security Technology Certification Program), das Demonstrationsprogramm für Umwelttechnologie des Verteidigungsministeriums, demonstriert:
• Ein flaches Design, das es dem System ermöglicht, in der Grenzzone zu arbeiten, wodurch die Belastung durch Strömungen minimiert und der Widerstand gegen Zug und Wellen minimiert wird
• Ein leistungsstarkes, modulares Leichtbaudesign, das die Anpassung der Aufstandsfläche und des Ballasts ermöglicht, um den Transport durch Böden und Dreck mit geringem Auflagedruck zu ermöglichen und gleichzeitig die Traktion zum Ziehen von Instrumentenschlitten bereitzustellen
• Modularität und Montage vor Ort ermöglichen den Transport von einem Mann in umweltkritischem oder schwierigem Gelände
• Sehr geringes selbsterzeugtes elektromagnetisches (EM) und akustisches Rauschen minimieren die Instrumenteninterferenz
In dieser Mission schleppte der Sea Ox ein White River Technologies, Inc. (WRT) marinisiertes Flex-EM-Detektor-Array. Die Projektziele waren:
• Beurteilung der Fähigkeit zur Durchführung integrierter geophysikalischer Untersuchungen mittels mitgeführter und geschleppter Ausrüstungspakete über eine Reihe von Gelände- und Seegangszuständen
• Entwickeln Sie Manöverstrategien mit einem Tow-Paket
• Ermitteln Sie das Mapping, die Überdeckungsgenauigkeit
• Beurteilen Sie die betrieblichen Vorteile des kleineren modularen Designs
• Zeigen Sie vollständige Lebenszykluskosteneffektivität einschließlich Mobilisierung und Demobilisierung, vor Ort spezifische Fahrzeugmodifikation für die Unterstützung von Umwelt und Nutzlast, Wiederherstellung von festgefahrenen Fahrzeugen sowie Wartung und Reparatur
Diese wurden durchgeführt. Der leistungsfähigere Sea Ox ist modular mit einer einzigen Werkzeuganordnung und einem maximalen Gewicht von 25 kg. Es kann bis zu ein ganzes Jahr an Station für die Standortbestimmung von Standorten mit mehreren Standorten, sich selbst entwickelnden Tages- und Jahreszeiten liefern.
Und weiter. . .
Seafloor Crawler sind eine aufstrebende Kategorie der Unterwasserroboter. Dank der verbesserten Komponententechnologie bieten diese Tools jetzt eine nützliche Leistung. Für eine nachhaltige, präzise Vermessung durch die Brandungszone gibt es nun brauchbare Roboterplattformen, die uns zurück ins Meer bringen.
Surinams GranMorgu-FPSO-Projekt zur Evaluierung des windunterstützten Schleppens
-172264 "(Bildnachweis: SBM Offshore)")
Inpex-Arbeiter in Australien beenden Arbeitskampf um LNG-Leistungen mit wegweisender Gehaltsvereinbarung

Halliburton sichert sich Bohr- und Fertigstellungsvertrag für das GranMorgu-Projekt von TotalEnergies
")
Velesto beendet Verkauf der Hubinsel NAGA 3 an indonesisches Unternehmen

-172177 "NAGA 3-Rig (Bildnachweis: Velesto)")
-172102 "(Bildnachweis: Cheniere)")

-171989 "(Bildnachweis: Aker BP)")
-171929 "Nordlicht Monopile-Installation (Quelle: DEME)")

-171805 "(Bildnachweis: Vard)")

