Gute Unterwasserfahrzeuge werden in kleinen Paketen geliefert
-109905 "Das Riptide AUV (Credit BAE Systems)")
Das Riptide AUV (Credit BAE Systems)
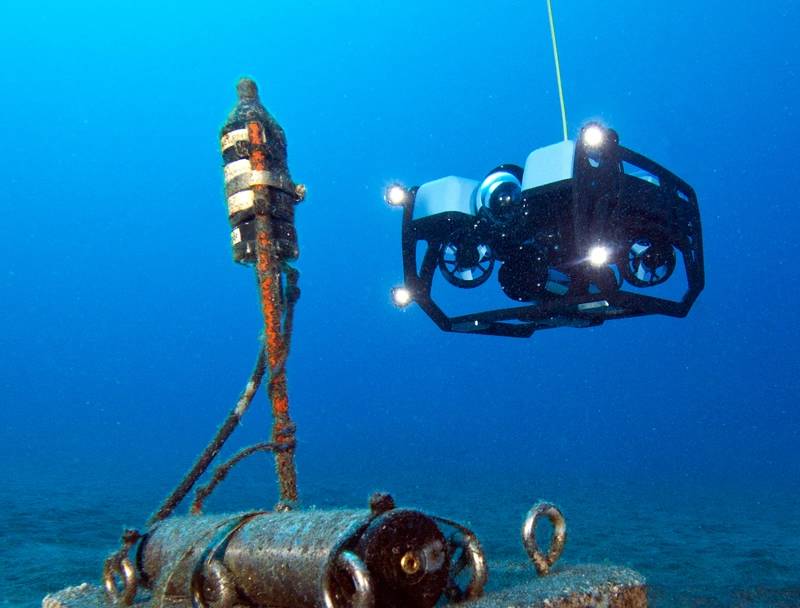
-109906 "Ein Dreizack-ROV (Credit SOFAR Ocean)")
Ein Dreizack-ROV (Credit SOFAR Ocean)
")
RangerBot über einem Riff (Credit Matthew Dunbabin / QUT)
Die Ferienzeit ist gerade vorbei und viele haben vielleicht den Satz gehört: "Gute Dinge kommen in kleinen Paketen." Gilt dies für die heutigen Unterwasserfahrzeuge? In der Tat. Einer der auffälligsten jüngsten Trends auf diesem Gebiet ist die Verbreitung von kompakten und erschwinglichen, aber hochwirksamen Unterwasserfahrzeugen. In den letzten zehn Jahren wurden neue ferngesteuerte Fahrzeuge (ROVs) und autonome Unterwasserfahrzeuge (AUVs) hergestellt, die leicht von einer Person getragen und eingesetzt werden können. Diese kleinen Fahrzeuge setzen auf Entwicklungen bei Schaltkreisen, Sensoren und Batterien, die von der Unterhaltungselektronik inspiriert sind, und übertreffen in praktischen Anwendungen ihre Gewichtsklasse.
Es gibt viele Beispiele für ROV und AUV, die in Betracht gezogen werden könnten, aber eine Auswahl von vier ist es wert, als Beispiele für die Kategorie betrachtet zu werden. Sie bieten auch unterschiedliche Perspektiven für einige wichtige technische und betriebliche Entscheidungen. Für ROVs ist der Sofar Ocean Trident vielleicht der Inbegriff für kompakte Leistung und Designoptimierung. Die Blue Robotics mit dem passenden Namen BlueROV bietet eine flexiblere Option. In AUVs wird der hochentwickelte „klassische“ Ansatz durch das Riptide-Kleinstfahrzeug von BAE Systems demonstriert, wenn auch mit einem sehr flexiblen Software-Ausblick. Ein Neuzugang der Queensland University of Technology, der RangerBot, präsentiert einen neuen Paradigmenwechsel, um die Kosten für bestimmte Anwendungsfälle niedrig zu halten.
Ausgehend von den ROVs bietet der BlueROV von Blue Robotics einen typischen ROV-Formfaktor. Das Fahrzeug wurde genau wie ein größeres Arbeits- oder Forschungs-ROV konstruiert und verfügt über einen offenen Rahmen, der die Elektronik- und Batteriegehäuse, die Triebwerke, den Auftriebsschaum und die Ballastgewichte trägt. Dieses einfache Design ist robust, erweiterbar und dem Fachgebiet bestens vertraut. Das System bietet Konfigurationen mit sechs und acht Strahlrudern, viele optionale Zubehörteile sowie erhebliche Leistung und Flexibilität. Der neuartige Ansatz zur Kostenreduzierung und zum Management der Komplexität macht dies jedoch zu einem neuen Spiel.
Um die Kosten gering zu halten, wird der BlueROV teilweise zusammengebaut ausgeliefert. Die Montage durch den Benutzer dauert schätzungsweise sechs bis zwölf Stunden. Dies ist eine Kostenersparnis für den Käufer und bietet dem Kunden die Möglichkeit, die Komponenten und die Systemarchitektur zu verstehen. Dies unterstützt ein Tool, das für Änderungen und Upgrades durch Endbenutzer vorgesehen ist. Das Fahrzeug nutzt gängige Drohnentechnologien und nutzt die Open-Source-Firmware für die ArduSub-Steuerung. Dies bietet sowohl nützliche Funktionen als auch eine umfangreiche Benutzergemeinschaft. Der Bediener steuert das ROV mit einem Laptop und einem Gamecontroller. Die Open-Source-Anwendung QGroundControl stellt die Benutzeroberfläche bereit. Diese leistungsstarke Technologiekombination wird zu einem bemerkenswert niedrigen Einstiegspreis von 3.500 US-Dollar angeboten. Dies bringt ein wirklich leistungsfähiges ROV zu einem bedeutenden neuen Publikum.
 Ein BlueROV (Credit Blue Robotics, Jeff Milisen) Auch der Trident von Sofar Ocean, ehemals OpenROV, erweitert das Publikum für ROVs. Dieses kompakte ROV ist eine Fallstudie zur technischen Optimierung. Sein Formfaktor und seine Architektur sind eine wesentliche Weiterentwicklung anderer batteriebetriebener ROVs. Trident verfügt über ein einzigartiges Design, das die Vielseitigkeit und Steuerung eines ferngesteuerten Fahrzeugs (ROV) und die Effizienz eines autonomen Unterwasserfahrzeugs (AUV) kombiniert. Es kann auf engstem Raum ausgedehnte lineare Schnitte und komplexe Manöver ausführen. Mit nur drei Triebwerken in einer einzigartigen Versatzkonfiguration kann sich das ROV effizient vorwärts bewegen, aber sehr feinfühlig manövrieren. Das außermittige vertikale Triebwerk des ROV kann dazu führen, dass es sich bei hohen Geschwindigkeiten neigt, aber auch schwebt oder die Tiefe ändert, ohne sich bei niedrigen Geschwindigkeiten zu neigen - ähnlich wie ein traditionelles ROV. Zusätzlich zu einem eleganten hydrodynamischen Design wurde Trident entworfen in hohem Grade beweglich und ziemlich haltbar zu sein. Das ROV ist klein genug, um in einen Rucksack zu passen, während die Seitenwände mit einer Gummibeschichtung versehen sind, die ihm eine Form von Stoßfängern verleiht. Die Benutzeroberfläche basiert auf Internetstandards wie HTML5 und WebGL, um die Steuerung nur über einen Browser zu ermöglichen, der auf Laptops, Tablets und Mobilgeräten ausgeführt wird. Die Akzeptanz moderner Software-Open-Source-Ansätze stellt sicher, dass die Codebasis sowohl von der Community als auch vom Unternehmen kontinuierlich aktualisiert werden kann. Auf diese Weise können benutzergesteuerte Softwareänderungen wie neue Benutzeroberflächen das Betriebserlebnis und die Bereitstellung verbesserter ROV-Funktionen für die globale Trident-Community beeinflussen.
Ein BlueROV (Credit Blue Robotics, Jeff Milisen) Auch der Trident von Sofar Ocean, ehemals OpenROV, erweitert das Publikum für ROVs. Dieses kompakte ROV ist eine Fallstudie zur technischen Optimierung. Sein Formfaktor und seine Architektur sind eine wesentliche Weiterentwicklung anderer batteriebetriebener ROVs. Trident verfügt über ein einzigartiges Design, das die Vielseitigkeit und Steuerung eines ferngesteuerten Fahrzeugs (ROV) und die Effizienz eines autonomen Unterwasserfahrzeugs (AUV) kombiniert. Es kann auf engstem Raum ausgedehnte lineare Schnitte und komplexe Manöver ausführen. Mit nur drei Triebwerken in einer einzigartigen Versatzkonfiguration kann sich das ROV effizient vorwärts bewegen, aber sehr feinfühlig manövrieren. Das außermittige vertikale Triebwerk des ROV kann dazu führen, dass es sich bei hohen Geschwindigkeiten neigt, aber auch schwebt oder die Tiefe ändert, ohne sich bei niedrigen Geschwindigkeiten zu neigen - ähnlich wie ein traditionelles ROV. Zusätzlich zu einem eleganten hydrodynamischen Design wurde Trident entworfen in hohem Grade beweglich und ziemlich haltbar zu sein. Das ROV ist klein genug, um in einen Rucksack zu passen, während die Seitenwände mit einer Gummibeschichtung versehen sind, die ihm eine Form von Stoßfängern verleiht. Die Benutzeroberfläche basiert auf Internetstandards wie HTML5 und WebGL, um die Steuerung nur über einen Browser zu ermöglichen, der auf Laptops, Tablets und Mobilgeräten ausgeführt wird. Die Akzeptanz moderner Software-Open-Source-Ansätze stellt sicher, dass die Codebasis sowohl von der Community als auch vom Unternehmen kontinuierlich aktualisiert werden kann. Auf diese Weise können benutzergesteuerte Softwareänderungen wie neue Benutzeroberflächen das Betriebserlebnis und die Bereitstellung verbesserter ROV-Funktionen für die globale Trident-Community beeinflussen.
Dieses benutzerfreundliche, leistungsstarke Paket ist bei Amazon für 1.700 US-Dollar erhältlich. Es ist wirklich eine neue Ära für zugängliche und nützliche Ozeanroboter. Diejenigen, die eine fest verbundene Erfahrung suchen, können ein hochoptimiertes System oder einen modularen Ansatz mit mehr Konfigurierbarkeit für den Endbenutzer wählen. In beiden Fällen kann man für die Kosten eines modernen Laptops oder PCs voll ausgestattet sein, um sinnvolle Missionen in Wassertiefen von bis zu 100 Metern durchzuführen. Diejenigen, die bereit sind, die Schnur zu durchtrennen, haben zusätzliche Optionen.
Effektive AUVs sind in den letzten Jahren kleiner und erschwinglicher geworden. Wie bei ihren ROV-Cousins gibt es mehrere Beispiele, die in Betracht gezogen werden müssen. Das moderne AUV „micro“ lässt sich am besten mit den Produkten von BAE Systems, ehemals Riptide Autonomous Solutions, kombinieren. Riptide ist eine Geschichte von kleinen Fahrzeugen und schnellem Wachstum. Gegründet im Jahr 2015 lieferte Riptide schnell ein kompaktes AUV-Angebot.
Das erste Produkt von Riptide war das Micro-UUV, ein hochflexibles autonomes Open-Source-Unterwasserfahrzeug, das eine hochmoderne, kostengünstige Lösung für Entwickler von Autonomie- und Verhaltensmerkmalen, Unterwassersensoren und anderen neuen Nutzlasten bot. Das Micro-UUV verfügte über offene Hardware- und Softwareschnittstellen, die den Benutzern eine zuverlässige und robuste Plattform für die Weiterentwicklung der Technologie bieten. Das Fahrzeugdesign wurde für einen hohen Wirkungsgrad mit der besten hydrodynamischen Signatur seiner Klasse optimiert. Das Basis-Mikro-UUV hat einen Durchmesser von 4,7 / 8 Zoll, eine Länge von 40 Zoll und ein Gewicht von 22 Pfund. Das Standardsystem ist für eine Tiefe von 300 Metern ausgelegt.
Während dieses Fahrzeug wie ein „typisches“ Angebot der Branche aussehen mag, unterscheidet es sich nicht nur durch seine geringe Größe. Der Fokus auf die Bedürfnisse der Endbenutzer war beim Softwaredesign am weitesten verbreitet. Im Gegensatz zu typischen proprietären Architekturen verfügte das Micro-UUV über eine flexible Architektur, die eine große Menge an Open-Source-Software nutzte. In der ersten Version der Micro-UUV-Software bot Riptide Code für die Entwicklungsplattformen Arduino und Beaglebone Black sowie Unterstützung für die MOOS-IvP-Robotersteuerungs-Engine an. Dies war ein leistungsstarkes Feature-Set für jedes AUV. Bei einem Startpreis von rund 15.000 USD bestand ein erhebliches Marktinteresse.
Bis 2019 verzeichnete BAE Systems den Erfolg dieses Produkts. Die BAE Systems FAST Labs-Organisation hat Riptide übernommen und entwickelt nun die Plattformtechnologie und die Skalierungsfertigung weiter. FAST Labs ist der Forschungs- und Entwicklungszweig von BAE Systems, Inc. und in der Branche einzigartig
Rüstungsindustrie als firmeninternes, kundenfinanziertes F & E-Geschäft konzipiert
Arbeiten Sie im gesamten globalen Unternehmen des Unternehmens zusammen, um fortschrittliche Technologien zu entwickeln und umzustellen. Das ursprünglich von Riptide eingeführte Mikro-AUV profitiert von diesem Prozess.
Ein weiteres kleines AUV, das kürzlich aufgetaucht ist, ist der RangerBot. Dieses Fahrzeug verfolgt einen anderen Ansatz, um eine erschwingliche Lösung für Endbenutzer bereitzustellen. Der RangerBot wurde von Ingenieuren der Queensland University of Technology (QUT) in Brisbane, Australien, entwickelt. Das Team von QUT arbeitet in einem Robotikzentrum mit Schwerpunkt auf Bildverarbeitung. Sie unterstützen auch die Umweltverträglichkeitsprüfung am Great Barrier Reef. Ein entscheidender Paradigmenwechsel wurde ermöglicht, als das Team erkannte, dass die Wasserbedingungen in seiner Zielumgebung sehr klar waren und ausschließlich visuelle Wahrnehmung einsetzte.
 RangerBot über einem Riff (Credit Matthew Dunbabin / QUT) Das hört sich vielleicht offensichtlich an, aber RangerBot wurde kleiner, benutzerfreundlicher und erschwinglicher als herkömmliche Alternativen, da Größe, Leistung und vor allem die Kosten für akustische Instrumente vernachlässigt wurden. Mit einer Reihe von Kameras kann der RangerBot sowohl seinen horizontalen Kurs über den Boden als auch seine Tiefe verwalten. Mit den neuesten Fotomosaik-Tools kann das Fahrzeug auch nützliche Datenprodukte über einen Vermessungsstandort erstellen. Die visuellen Systeme ermöglichen auch komplexe Umweltmanagementanwendungen. RangerBot und seine Vorgängerprototypen haben sich als fähig erwiesen, Dornenkronen-Seesterne (COTS) zu identifizieren, ein Raubtier, das Korallenriffe verwüsten kann. Die AUVs haben auch die Fähigkeit bewiesen, eine Nutzlast zu transportieren, die das COTS durch präzise Injektion einer Lösung eliminieren kann, die nur den invasiven Organismus schädigt. Die Nutzlastschnittstelle, die diese Mission unterstützt, hilft auch bei der Riffwiederherstellung. Auf dem RangerBot kann eine Blase mit bis zu 8 Litern Korallenlarven installiert werden. Mit seinen automatisierten Sichtfähigkeiten kann das AUV die richtigen freien Stellen auf einem degradierten Riff identifizieren und die entsprechende Larvenkonzentration ablagern. Somit kann ein voll beladener RangerBot ungefähr 250 Quadratmeter Riff säen. Dies ist effizienter als frühere Techniken auf Taucherbasis.
RangerBot über einem Riff (Credit Matthew Dunbabin / QUT) Das hört sich vielleicht offensichtlich an, aber RangerBot wurde kleiner, benutzerfreundlicher und erschwinglicher als herkömmliche Alternativen, da Größe, Leistung und vor allem die Kosten für akustische Instrumente vernachlässigt wurden. Mit einer Reihe von Kameras kann der RangerBot sowohl seinen horizontalen Kurs über den Boden als auch seine Tiefe verwalten. Mit den neuesten Fotomosaik-Tools kann das Fahrzeug auch nützliche Datenprodukte über einen Vermessungsstandort erstellen. Die visuellen Systeme ermöglichen auch komplexe Umweltmanagementanwendungen. RangerBot und seine Vorgängerprototypen haben sich als fähig erwiesen, Dornenkronen-Seesterne (COTS) zu identifizieren, ein Raubtier, das Korallenriffe verwüsten kann. Die AUVs haben auch die Fähigkeit bewiesen, eine Nutzlast zu transportieren, die das COTS durch präzise Injektion einer Lösung eliminieren kann, die nur den invasiven Organismus schädigt. Die Nutzlastschnittstelle, die diese Mission unterstützt, hilft auch bei der Riffwiederherstellung. Auf dem RangerBot kann eine Blase mit bis zu 8 Litern Korallenlarven installiert werden. Mit seinen automatisierten Sichtfähigkeiten kann das AUV die richtigen freien Stellen auf einem degradierten Riff identifizieren und die entsprechende Larvenkonzentration ablagern. Somit kann ein voll beladener RangerBot ungefähr 250 Quadratmeter Riff säen. Dies ist effizienter als frühere Techniken auf Taucherbasis.
Inspiriert von diesen erfolgreichen Forschungsanstrengungen hat das Team von QUT das RangerBot-Design für die Produktion optimiert und bereitet sich auf die Unterstützung einer Kommerzialisierung vor. Wenn diese Produktvariante auf den Markt kommt, wird sie eine leistungsstarke Lösung bieten, die die Effizienz des Freischwimmens von AUV mit der Manövrierfähigkeit von ROV sowie erweiterten Vermessungs- und Inspektionsfunktionen kombiniert. Die Einschränkung hierbei ist, dass die Klarheit des Wassers hoch genug sein muss, damit die visuelle Technologie funktioniert. Aber es gibt viele solcher Betriebsumgebungen im globalen Ozean.
Die hier vorgestellten Beispiele sollen die Aussage bestätigen, dass „gute Unterwasserfahrzeuge in kleinen Paketen geliefert werden“. ROV- und AUV-Benutzer haben viele Möglichkeiten, auch über die hier diskutierten Systeme hinaus. Die Trends, die diesen Entwicklungen zugrunde liegen, umfassen eine stärkere Akzeptanz von Open-Source-Software, modernen Produktionstools und Kostenvorteilen aus anderen Bereichen, insbesondere der Unterhaltungselektronik. Bemerkenswert ist auch der Einfluss von innovativem Denken und klarem Blechdesign. Die hier vorgestellten Fahrzeuge und viele andere kompakte Angebote auf dem Gebiet profitieren vom Denken von Einzelpersonen oder Organisationen, die in der Branche neu sind. Sich von älteren Technologien oder Designkonzepten zu befreien, scheint eine große Idee zu sein, die der kleineren Unterwasserfahrzeug-Community den Weg ebnet.
Vattenfall installiert ersten Monopile auf Deutschlands größtem Offshore-Windpark
-171929 "Nordlicht Monopile-Installation (Quelle: DEME)")
Der ehemalige Pemex-Chef wird wegen Missbrauchsverdachts untersucht; der mexikanische Präsident Sheinbaum bietet keinen Schutz.

Vard liefert Hybrid-Kabelverleger an Toyo Construction
-171805 "(Bildnachweis: Vard)")
Equinor gibt japanischen Offshore-Windpark auf

Schwimmende Kernkraftwerke: Eine neue Grenze der Offshore-Energie

Murphy stößt vor der Küste Westafrikas auf Öl

Das Offshore-Feld Mako macht mit der Auftragsvergabe an PT PAL einen Schritt in Richtung erster Gasförderung.

-171635 "(Bildnachweis: Conrad)")
Valeura schließt Bohrarbeiten in Nong Yao ab und steigert die Produktion im Golf von Thailand

PRIO nimmt vierte Wahoo-Bohrung in Betrieb und schließt geplanten Produzenten-Rollout ab
-171544 "(Quelle: PRIO)")
Vaalco meldet starke Bohrergebnisse vor Gabun, während die Bohrkampagne voranschreitet.
-171461 "(Quelle: Vaalco Energy)")
Cadeler installiert die letzte Turbine im 1,4-GW-Offshore-Windpark Sofia von RWE.
-171414 "(Bildnachweis: Cadeler)")
Serica schließt Übernahme von Vermögenswerten in der Nordsee von ONE-Dyas ab
-171360 "(Quelle: Serica Energy)")