Aufenthalt im Warten
")
Es war lange eine Vision, Unterwasserfahrzeuge zu haben, die den Unterwassereinsatz unterstützen können, ohne auf ein Oberflächenschiff angewiesen zu sein. Wir sind dieser Vision näher als je zuvor, aber was ist neu, das es vorher nicht gab, um dies zu verwirklichen?
Anfang des Jahres wurde bei Unterwasserfahrzeugen im Öl- und Gasgeschäft ein Meilenstein erreicht. Ein autonomes Unterwasserfahrzeug (AUV) koppelt drahtlos Daten an, lädt sie auf und lädt sie herunter, alles induktiv, mit automatischer Fernsteuerung und visueller Live-Steuerung während einer Demonstration in einem See in Schweden. Das Dock war Equinors offene Standard-U-Boot-Dockingstation (SDS) und das Fahrzeug war Saab Seaeyes Sabertooth.
Dies ist ein Schritt in Richtung einer dauerhaften Ansiedlung von Fahrzeugen unter Wasser. Weitere Demonstrationen werden folgen, wenn andere ihre neuen Fahrzeuge auf die Probe stellen. Aber einige werden sagen, dass wir schon einmal hier waren. Dies wurde in den 1990er Jahren versucht. Was gibt es Neues? Es ist eine Kombination von Kräften - markt- und technologieorientiert.
Für Gro Stakkestad, Manager für U-Boot-Eingriffe und Pipeline-Reparaturen bei Equinor, ist dies eine Kombination aus Abschwung, Automatisierungsdrang und zunehmendem Umweltbewusstsein. Laut Steffan Lindsø, Director für Emerging Technology in Europa bei Oceaneering, war die Offshore-Kommunikation die wichtigste fehlende Komponente sowie der Fortschritt bei den Batterie- und Navigationstechnologien, während Sean Halpin, Director für Produktmanagement und Marketing, bei dem neuen Anbieter Houston Mechatronics, sagt, Kostensenkung und Zugang zu Rechenleistung seien große Treiber. Bemühungen in Richtung der gesamten elektrischen Feldinfrastruktur werden ebenfalls helfen.
Das letzte Stück
Für Jan Siesjö, Chefingenieur von Saab Seaeye, war das Zusammenführen von Andocken, Laden und Herunterladen der Daten das letzte Puzzleteil, um diese Fähigkeit auf den Markt zu bringen. Im Hintergrund gab es jedoch noch viele andere Arbeiten, die sich hauptsächlich mit den Funktionen zur Fernsteuerung befassten.
„Fernsteuerung über große Entfernungen mag einfach erscheinen, aber um zuverlässig zu sein, muss eine Menge Personal vorhanden sein. Es geht nicht nur darum, Befehle über das Internet zu senden, sondern es gibt Systeme, die sich selbst schützen und gewartet werden können, damit nichts schief geht. Und wenn etwas schief geht, ist es nicht so komplex, dass Sie einen Ingenieur mit Universitätsabschluss benötigen, um das Problem zu beheben. “ Beinhaltet das Halten von Stationen, die Navigation von Wegpunkten und die Vermeidung von Hindernissen.
Auf der Kommunikationsseite hat Saab Seaeye mit Boeing zusammengearbeitet, ein ferngesteuertes Unterwasserfahrzeug (ROV) der Leopard Light Work Class über eine Satellitenverbindung in den USA gesteuert, Manipulationsarbeiten ausgeführt, Konnektoren gepaart, Missionen geflogen, Wegpunkte kontrolliert usw. “ Wir hatten einige ziemlich strenge Einschränkungen, nur 1 MB / Sek., Und eine Latenz, die wir auf bis zu drei Sekunden erhöht haben, und wir haben absichtlich die Datenqualität beeinträchtigt “, sagt Siesjö. „Trotzdem konnten wir fliegende Kabelstecker verbinden und viele andere Dinge tun. Das langfristige Ziel besteht darin, ein ROV aus einem sehr großen AUV herauszufliegen und Interventionsarbeiten auf verschiedene Arten auszuführen. “
 Saab Seaeyes Sabertooth, das Anfang dieses Jahres in Schweden induktives Laden und Herunterladen von Daten demonstrierte. (Foto: Saab Seaye)
Saab Seaeyes Sabertooth, das Anfang dieses Jahres in Schweden induktives Laden und Herunterladen von Daten demonstrierte. (Foto: Saab Seaye)
Das Arbeiten in der Tiefe ist eine weitere Herausforderung - sowohl das Aufrufen einer Site als auch das Aufrechterhalten von Kommunikationsverbindungen. Anfang dieses Jahres hat Saab Seaeye dieses Szenario getestet und drei Wochen lang Tests in 2.400 Metern Wassertiefe im Mittelmeer durchgeführt - angebunden und autonom - mit 100% erfolgreicher Kommunikation und Positionierung des Fahrzeugs, selbst bei Volllast bis zu 4 Knoten Siesjö. Zu den Arbeiten in diesen Tiefen gehörte die Bestimmung, wie eine Baustelle effizient angefahren werden kann - 2.400 Meter sind ein langer Weg -, während die Positionierung mithilfe einer Kombination aus Trägheitsnavigationssystem (INS) und ultrakurzer Grundlinienpositionierung (USBL) beibehalten wird.
Saab Seaeye unterstützt seine Arbeit mit High-Fidelity-Simulatoren (wie die, die zum Testen der Kampfflugzeuge seiner Muttergesellschaft verwendet wurden), damit alle autonomen und Human-in-the-Loop-Steuerungssysteme mit der nativen Steuerungssoftware ausgeführt werden können und herausgefunden werden kann, ob sie funktionieren - Lange bevor sie ins Wasser gehen.
Darüber hinaus wird untersucht, wie Fahrzeuge mithilfe eines Stereokamerasystems 3D-Simultanlokalisierung und -kartierung (SLAM) in Echtzeit 3D-Karten der Umgebung erstellen können, in der sie sich befinden. Dadurch kann das Fahrzeug navigieren und messen, was es relativ zu sich selbst sieht. Saab Seaeye testet diese Fähigkeit seit 2018 und baut 3D-Wolken der Unterwasserwelt.
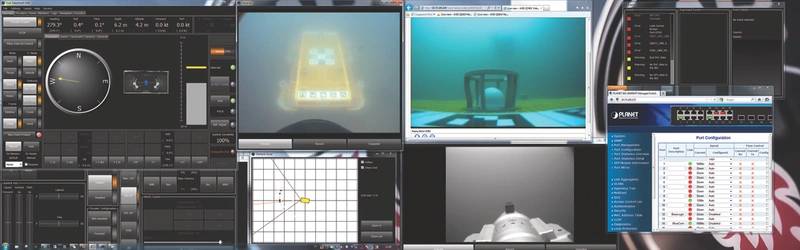 Mit einfach zu bedienenden, fortschrittlichen Fernbedienungen wurde das Andocken mit einem Live-Video-Feed an Land demonstriert. (Bild: Saab Seaye)
Mit einfach zu bedienenden, fortschrittlichen Fernbedienungen wurde das Andocken mit einem Live-Video-Feed an Land demonstriert. (Bild: Saab Seaye)
Geosub nach AIV
Ein anderes Unternehmen, das diese Fähigkeit seit einiger Zeit aufbaut, ist Subsea 7. In den 1990er Jahren stand es hinter Geosub, einer Technologie, die von Subsea 7 vom National Oceanography Center (NOC) lizenziert wurde. Das Hauptziel war die autonome Inspektion von Pipelines mithilfe von Wegpunktnavigation und Autotracking, um die Qualität und Effizienz von Vermessungsdaten auf dem Meeresboden zu verbessern und die Unterstützung von Oberflächenschiffen zu verringern. Es war zwar ein Erfolg in Bezug auf die Datenqualität, musste aber dennoch von einem Schiff aus gestartet und wiederhergestellt werden und benötigte eine Oberflächenunterstützung für die Positionierung. Es konnte auch keine kathodischen Schutzmessungen durchführen, so dass es begrenzt war.
Subsea 7 ist im Rahmen seines i-Tech 7-Geschäfts weitergegangen und verfügt nun über ein autonomes Inspektionsfahrzeug (AIV), für das die Fähigkeit zur Standortveränderung von zentraler Bedeutung ist. Es wurde unter seinem Vorgänger, dem Prototyp AIV, entwickelt, sodass keine reguläre Position erforderlich ist Aktualisierungen von einem Oberflächenschiff. „Auslöser für die Entwicklung war die Entscheidung, auf autonome schwebende Fahrzeuge umzusteigen, wobei der Schwerpunkt auf der Inspektion von Unterwasserinfrastrukturen im Innenbereich lag. Da der Zweck nun darin bestand, vorhandene Ausrüstung zu inspizieren, konnte die Ausrüstung selbst verfolgt werden, um die hochgenauen Positionen bereitzustellen, die für die Navigation ohne Aktualisierungen von einem Oberflächenschiff benötigt werden. “Es ähnelt dem Autotracker, ist jedoch in 3D und kann als eine Form von beschrieben werden ZUSCHLAGEN.
Die AIV verfügt außerdem über ein eigenes Unterwasser-Andocksystem, das die Start- und Bergungsoperationen von den Schiffen trennt. "Die Einführung einer vereinfachten Missionsplanung in Verbindung mit der Umlokalisierung der angetriebenen Navigation und einem Prozess, bei dem sich die AIV selbst an den Korb ankoppeln könnte, hat die Verbindung zur Schiffszuverlässigkeit aufgehoben", sagt Jamieson.
 Fernbedienungen werden auch mit ROVs durchgeführt. Dies ist das Onshore-Kontrollzentrum von i-Tech 7 für den ROV-Betrieb. (Foto: i-Tech 7)
Fernbedienungen werden auch mit ROVs durchgeführt. Dies ist das Onshore-Kontrollzentrum von i-Tech 7 für den ROV-Betrieb. (Foto: i-Tech 7)
Standardisiertes Docking
Ein großer Schub in diesem Bereich ging von Equinor aus, der eine Vision für „Unterwasser-Interventionsdrohnen“ (UID) vorstellte und Aufträge erteilte, unter anderem für die Entwicklung eines Open-Standard-Sicherheitsdatenblatts, das von jedem Fahrzeug verwendet werden kann . Das SDS-Design enthält induktive Steckverbinder mit den Markierungen Blue Logic und WiSub sowie AruCo und ChaRuCo, die die Kamera der Drohne für ihre relative Position erkennt. Das in Trondheim ansässige Unternehmen für akustische Kommunikation und Ortung Water Linked liefert auch kleine akustische Modems für die Fahrzeugortung auf der Station. Das SDS kann auch andere Sensoren aufnehmen, z. B. das optische Freiraummodem BlueComm von Sonardyne für Live-Video-Feeds oder das Herunterladen von Daten mit hoher Bandbreite. Es gibt auch Standardschnittstellen, die von der SWiG-Gruppe (Subsea Wireless Interface Group) und Deepstar für die Mechaniker entwickelt werden.
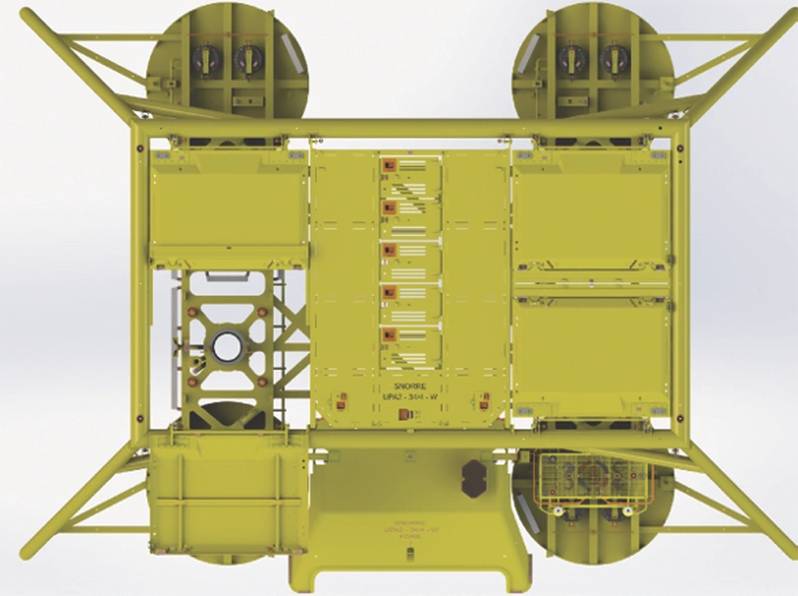 Equinors offenes Standard-Design für die Unterwasser-Dockingstation, das wie ein kleiner Hubschrauberblock in eine Mannigfaltigkeit gesteckt dargestellt ist. (Bild: Blaue Logik)
Equinors offenes Standard-Design für die Unterwasser-Dockingstation, das wie ein kleiner Hubschrauberblock in eine Mannigfaltigkeit gesteckt dargestellt ist. (Bild: Blaue Logik)
Das von Blue Logic in Norwegen gebaute SDS wurde in einem Dock in Trondheim sowie 2,2 km vor der Küste der biologischen Station Trondheim in 350 m Wassertiefe eingesetzt. Ein weiteres Ziel ist das Åsgard-Feld, in dem ein Eelume-Schlangenroboter an einem Strom- und Glasfaserkabel arbeitet, das mit der schwimmenden Produktionseinheit Åsgard A verbunden ist. Die nächsten Schritte umfassen eine breitere Einführung des Snorre-Erweiterungsprojekts, bei dem sieben Sicherheitsdatenblätter (integriert in Verteiler oder eigenständig mit Glasfaserschutzabdeckungen) im Abstand von 15 Kilometern verwendet und im Feldlayout an Strom und Kommunikation angeschlossen werden könnten.
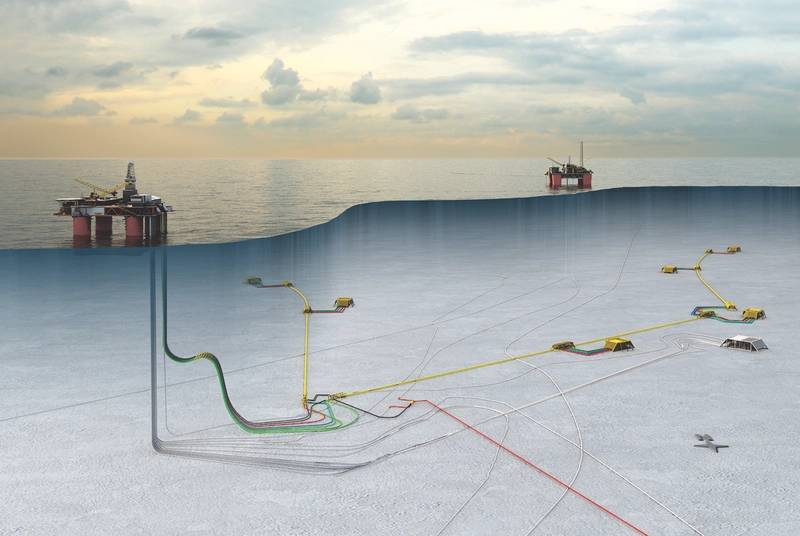 Das Feldlayout des Snorre-Erweiterungsprojekts, das bald von Unterwasserdrohnen unterstützt werden könnte. (Bild: Equinor)
Das Feldlayout des Snorre-Erweiterungsprojekts, das bald von Unterwasserdrohnen unterstützt werden könnte. (Bild: Equinor)
Neue Modelle entwickeln
Diese Entwicklungen beeinflussen jetzt die Art und Weise, wie neue Entwicklungen auf der grünen Wiese geplant werden, sagt Jamieson. Tatsächlich hat i-Tech 7 feldweite IRM-Dienste für Equinor unter Verwendung einer UID auf den Feldern Snorre Expansion Project (SEP) und Snorre A (SNA) in der norwegischen See sowie auf anderen Gebieten untersucht.
In der Studie wurde das Potenzial für die Einführung von Unterwasser-Hybridfahrzeugen bewertet, indem technische Lücken ermittelt wurden, die den langfristigen Einsatz der UID auf dem Meeresboden verhindern würden. Außerdem wurden Optionen für Dockingstationskonfigurationen bewertet und empfohlen, um das Fahrzeug zu unterstützen, indem ein Überblick über die erforderlichen Konfigurationen und Eigenschaften gegeben wurde. Da die Stromversorgung und ein zuverlässiges Datennetz für den Erfolg von entscheidender Bedeutung sind, prüfte das Unternehmen die Betriebs- und Verwaltungsvorschriften, um die Aktivitäten des Unterwasser-Hybridfahrzeugs zu unterstützen. Das Endziel des Projekts war es, einen Entwicklungsplan zu empfehlen, damit die Drohnen bis Ende 2020 "live" gehen können.
„Fahrzeuge auf dem Meeresboden, die von Dockingstationen auf dem Meeresboden unterstützt werden, die für autonome Inspektionen verwendet werden und mit Kontrollräumen an Land verbunden sind, damit der Mensch die Interventionsaufgaben im Auge behält, treiben die Anforderungen erneut positiv voran“, so Jamieson. „Fahrzeuge müssen monatelang unter Wasser ansässig sein und dürfen nicht gewartet oder repariert werden. Diese höhere Messlatte für Zuverlässigkeit und Kontrolle stärkt auch den traditionellen ROV-Betrieb mit der Fernsteuerung von Fahrzeugen aus Onshore-Kontrollzentren und der Elektrifizierung von Fahrzeugen für eine höhere Zuverlässigkeit und Effizienz. “Dies alles führt zu weniger Schiffstagen und weniger Personen vor der Küste.
Es besteht die Möglichkeit, Untersee-Systeme zu vereinfachen. Andere Stellantriebe als bei sicherheitskritischen Systemen können manuell anstelle von hydraulisch oder elektrisch betrieben werden, wodurch die hydraulischen und elektrischen Systeme, die unter Wasser installiert werden müssen, reduziert werden - das bedeutet weniger Kabel.
Helge Sverre Eide, Business Manager bei Blue Logic, sagt, dass sich das Unterwassersystem und die Betriebsphilosophie ändern müssen, damit Drohnen unter Wasser starten können. „Damit dies wirtschaftlich ist, muss der Arbeitsumfang von Drohnen erweitert werden“, sagt er. „Sie benötigen neue Werkzeuge und müssen das Unterwasser-Produktionssystem anpassen oder ändern. Sie müssen beide Seiten der Gleichung ändern. Neue Werkzeuge müssen leicht sein, damit eine Drohne sie fliegen kann. Unterwasserwartung muss geändert werden, um kleinere Teile auszutauschen. Eine andere Denkweise - wenn etwas heruntergefahren wird, können Sie es einfach ändern - ist jetzt möglich. Das ist eine neue Philosophie. “
 (Foto: Saipem) (Foto: Saipem) |
In Italien war Saipem mit seinem Hydrone R beschäftigt, der einen sechsmonatigen Test in Saipems Unterwasser-Spielpark in der Nähe des Hafens von Triest im Nordosten Italiens startete. Es wurde kürzlich bekannt gegeben, dass das Fahrzeug 2020 von Equinor vor der Küste Norwegens eingesetzt wird. Equinor hat Saipem im Auftrag der Njord-Lizenz einen 10-jährigen Unterwasser-Servicevertrag über 43,7 Millionen US-Dollar für die Nutzung der Technologie erteilt, der mit der Wiederaufnahme der Produktion auf dem Njord-Feld beginnt . Hydrone R wird als hybrides ROV mit AUV-Funktionen beschrieben. Es verfügt z. B. über Manipulatoren für Interventionsarbeiten und kann an einem 300 Meter langen Halteseil für die Echtzeitsteuerung in voller Bandbreite arbeiten. Es kann jedoch auch Entfernungen zwischen Untersee zurücklegen Felder, ohne Kabel wie ein AUV, mit einer akustischen Signalübertragung von bis zu 4 Kilometern. Sobald es sich an einem Arbeitsplatz befindet, kann es für überwachte Vorgänge auf optische Kommunikation mit hoher Bandbreite umschalten. Hydrone kann entweder von einer Garage auf dem Meeresboden oder von einem oberflächennahen System auf Missionsebene aus eingesetzt werden. Mit einer Nennweite von 3.000 Metern könnte es 8 bis 10 Stunden ohne Halteseil und bis zu 10 Kilometer weit fahren, sagt Stefano Maggio, technischer Leiter bei Saipem. Die Bereitstellung von einem Oberflächenhost aus könnte einfacher sein, da Sie keine Unterwasserinfrastruktur benötigen, sagt Maggio. „Sie sind möglicherweise anfällig für die Wetterbedingungen bei der Bereitstellung, verfügen jedoch über eine einfache Wartungsmöglichkeit.“ Allerdings ist das System für Unterwasserbewohner wetterunempfindlich. Sie können es daher bereitstellen und dort sechs Monate, ein Jahr lang, bleiben, bevor Sie sich erholen. Es bedeutet jedoch, dass Sie es nicht regelmäßig warten können, sodass höchste Zuverlässigkeit erforderlich ist. “ |
Eni treibt wichtige Tiefsee-Gasförderanlagen mit dualen FIDs voran

Petrobras übernimmt zwei Offshore-Beteiligungen von Petronas

Eni: Neue Gasfunde in Libyen

US-Beamte sagen ein schnelles Ende des Iran-Krieges voraus

Worley wird FEED- und Beschaffungsdienstleistungen für Chevrons Aphrodite-Gasfeld erbringen

Petronas macht neue Kohlenwasserstoffentdeckung in Südostasien

OneSubsea sichert sich dritten PTTEP-Unterwassersystemauftrag innerhalb eines Jahres
-168831 "(Quelle: SLB)")
Sunda Energy erhält Umweltgenehmigung für Bohrarbeiten vor der Küste Timor-Lestes

Borr Drilling versetzt drei Hubbohrinseln im Arabischen Golf in Bereitschaft
-168732 "Illustration (Bildnachweis: Borr Drilling)")
Das Produktionssystem des Sèmè-Feldes ist mit dem Ölfluss zum FSO Kristina verbunden.

-168671 "Stella Energy 1 MOPU (Bildnachweis: Drydocks World)")
Lamprell sichert sich ONGC-Auftrag für Unterwasser-Pipeline-Ersatzprojekt

Erste Turbine im dänischen Offshore-Windpark Thor in Betrieb genommen
-168578 "(Quelle: RWE/Sven Utermöhlen)")